DOMIN : Sulla, laissez Mademoiselle Glory vous regarder un peu.
HELENA : (se lève et tend la main) Ravie de vous rencontrer. Ce doit être très dur pour vous, ici, coupée du reste du monde.
SULLA : Je ne connais pas le reste du monde, Mademoiselle Glory. Je vous en prie, asseyez-vous.
HELENA : (s’assoie) D’où venez-vous ?
SULLA : D’ici, l’usine.
HELENA: Oh, vous êtes née ici.
SULLA : Oui, j’ai été fabriquée ici.
HELENA (Surprise) Comment ?
DOMIN : (riant) Sulla n’est pas une personne, Mademoiselle Glory, elle est un robot.
HELENA : Oh, s’il vous plait, excusez-moi.
Début de la pièce de théâtre R.U.R. de Karel Kapek, écrite en 1920, a utilisé pour la première fois le mot « robot ».
De l’électronique au numérique
Des millions de ligne de code, plusieurs calculateurs pour gérer les actionneurs moteurs, le système d’injection, de post traitement des gaz d’échappement (le cas VW), la boite de vitesse, le freinage, la climatisation ou encore le système d’infotainement. Progressivement l’automobile intègre l’électronique, c’est à dire que des fonctions autrefois uniquement mécaniques sont maintenant gérées par des capteurs, calculateurs, actuateurs. Cette évolution importante n’est cependant qu’une évolution mineure au regard des mutations qui arrivent. Pire, elle prépare l’arrivée d’autres acteurs venant du logiciel vers le cœur de la valeur automobile (lire la révolution numérique et la fin de l’automobile).
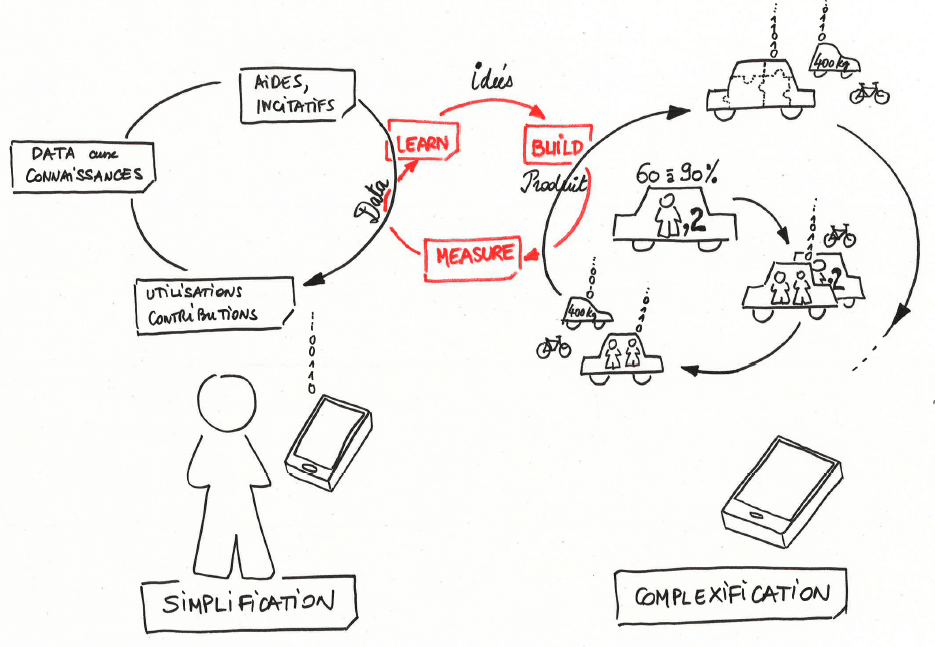
Pour le moment l’automobile reste un produit physique, vendu au kilo et au kilowatt. Les logiciels sont utilisés pour fournir des services à l’acheteur et respecter les normes. Christensen, dans le dilemme de l’innovateur, décrit ce besoin dans les domaines concurrentiels de surcharger le produit de fonctions quasi-inutiles pour le client dans le but de faire « plus » que les concurrents. Maintenant l’automobile devient « connectée » en produisant des données (Lire l’article Les données et l’auto) vers d’autres et en recevant des données. Le smartphone tient lieu à court et moyen termes de vecteur principal de ces flux. Toutes les voitures sont en fait déjà connectées. Pour les industries, cette étape prépare les bases d’une évolution majeure : des automobiles numériques auto-simulées. Progressivement, le logiciel dévore l’automobile.
L’électronique automobile, le GPS et l’internet rendent possible la création, pour chaque automobile, d’un double numérique entièrement simulé. Ce double sera, au début, créé par les industries automobiles (voir le récent MyCarMyData) et les principaux fournisseurs mondiaux. Cette simulation « temps réel » calculera toutes les caractéristiques du produit physique, sa position, sa dynamique, ses émissions polluantes, son usure, sa maintenance. Tout sera simulé, à la fois basé sur le temps réel du véhicule considéré mais également des véhicules « pairs » connectés échangeant en réseau, puis alimentant des outils prédictifs. Le double numérique sera alors capable de prévoir les évènements, de donner une vision « supérieure » au conducteur humain et à de nombreux acteurs, dont bien sûr les assurances (lire MétaNote 22). C’est la voie choisie par Toyota, clairement différente des voitures autonomes. Le véhicule physique sera alors « enrobé » d’un halo numérique possédant toutes les connaissances et lui conférant des capacités à simuler le futur. De nouveaux métiers vont consister à faire coller en permanence les véhicules physiques et numériques, à utiliser les évènements réels pour apprendre et nourrir les simulations qui nourriront à leur tour le conducteur en prévision. Le double numérique pourra déterminer : qui conduit, si vous êtes fatigué ou alcoolisé, si vous améliorez votre conduite, quelle est votre catégorie de conducteur en moyenne ou sur chaque trajet, si tel rond-point est dangereux, si votre franchise d’assurance est adaptée, quelle est votre contribution aux émissions de GES, de polluants, à la dangerosité, puis ensuite si votre voiture est adaptée à vos besoins (équivalent à « je regarde le prix dans un magasin d’un produit sur Amazon »), …
L’ère des automobiles numériques
Puis les doubles numériques seront gérés en réseaux, utilisés pour simuler des territoires entiers en terme de trafic, pollution, mobilité et permettant d’y accrocher facilement de nouveaux usages des objets physiques. Le double numérique prendra de plus en plus d’importance pour tous les services individuels et collectifs sur lesquels ils pourront s’appuyer. Les doubles numériques seront autant de porte d’entrée pour de nouveaux acteurs. Ils permettront de gérer les objets en maximisant leur usage et minimisant leur externalités. Pour tout cela, ce double échappera aux constructeurs des objets, pour être dominé par les acteurs de culture numérique. Schema.org a déjà commencé à spécifier les interfaces, les fonctions de l’automobile vues par les acteurs du web. Tout est construit pour être interfaçable, APIsable (lien vers l’article sur les API), connectable. Les constructeurs automobiles n’ont pas réussi à standardiser les sous-ensembles, les interfaces, les connexions. Un moteur ne se « branche » pas sur une autre voiture, toutes les interfaces sont à refaire pour chaque évolution, rien n’est ouvert, documenté.
Uber n’est pas une société de VTC ou même de transport. Uber déploie dans le monde un réseau numérique permettant de gérer des doubles numériques. Pour le moment, les voitures ne sont pas connectées, Uber utilise alors les smartphones des conducteurs et des clients, et commence à produire des connaissances simulées dans des villes. Quand existera des doubles numériques de ces voitures, Uber rajoutera des fonctions, des services et de nombreux partenaires utiliseront Uber et son API pour fonctionner. De puissants effets de réseaux pourront se déployer.
L’automobile fractale
La voiture autonome symbolise l’extrême de cette dualité : physique et numérique. Les 2 mondes s’y imbriquent intégralement, fractalement. Le numérique est dans le physique qui est dans le numérique ainsi de suite. Les constructeurs partent de l’objet qu’ils numérisent pour viser un salon roulant, alors que Google – Uber et Apple partent des usages pour concevoir les interfaces, les expériences en les appuyant sur des versions béta de bases roulantes. La voiture autonome dialoguera avec les usagers, mais aussi les piétons, les cyclistes, les autres voitures, pour apprendre de nos réactions et nos réactions s’adapteront en fonction de son comportement. Les interfaces et leurs design joueront un rôle majeur. Le double numérique collera parfaitement au physique. Nous serons en interaction principalement avec le double numérique par le biais de nombreuses interfaces. L’objet physique ne sera plus qu’un support d’interfaces, un générateur/utilisateur de données, une représentation visible du halo numérique.

En 2012, nous proposions : « L’automobile (lire MétaNote 14 L’avenir de l’automobile), en tant que matrice ontophanique, c’est à dire moule phénoménologique, produit par la culture et l’histoire, dans lequel se coule notre expérience-du-monde possible va progressivement disparaître. De nouvelles matrices ontophaniques vont la remplacer, plus fluides, plus ludiques, plus sociales ». Le récent brevet de Google confirme cette idée. Ce n’est pas un détail. La tôle ne convient plus, il faut ajouter des interfaces (numériques). Il préfigure ces nouvelles formes de relation entre l’homme et le robot.
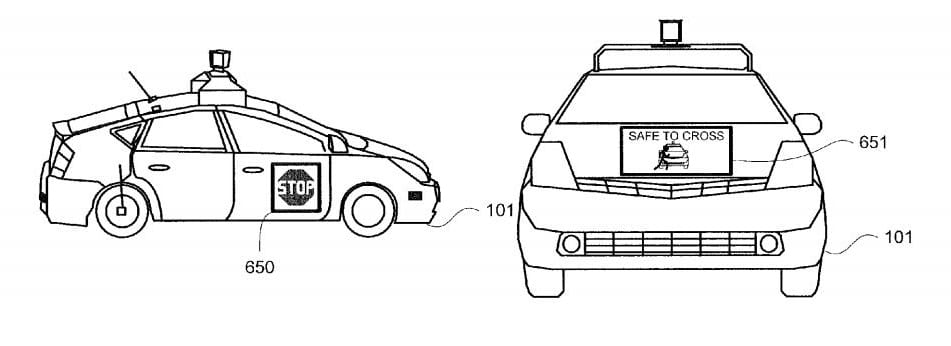
images du brevet Google
Les différents interlocuteurs (utilisateur, garagiste, piéton…) apprendront de nouvelles formes de dialogue avec le robot pour connaître ses intentions, donc ses règles algorithmiques, via de multiples interfaces. Et le robot d’ajuster en permanence ses algorithmes en fonction de nos réactions pour mieux faire comprendre ses intentions. Ainsi, nos réactions aux propositions numériques et aux comportements physiques du robot alimenteront le double numérique qui deviendra « l’essence même » de l’objet physique. Cette capacité singulière du numérique à pouvoir évoluer en permanence pour améliorer l’expérience constitue son avantage principal vis à vis de la production industrielle physique.
Le cybercar aura réussi quand nous pourrons « comprendre les algorithmes » qui le commande simplement en regardant l’objet. La dualité physique/numérique aura disparu.
Le logiciel aura dévoré l’automobile.